
Đối với một hệ lực cân bằng thì tổng đại số (tức là có lấy dấu) của mô men của tất cả các lực đối với một điểm bất kỳ phải bằng \(0\).
Ví dụ áp dụng 1
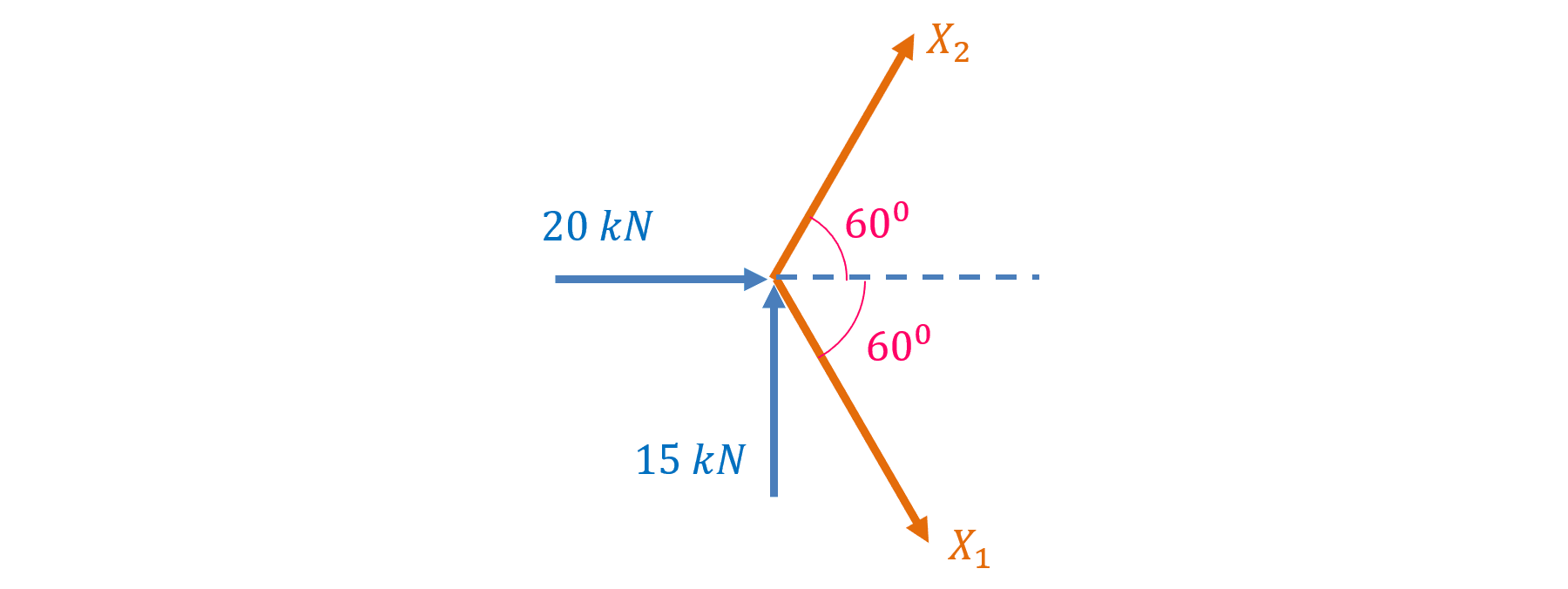
Xác định giá trị của các lực \(X_1\), \(X_2\) để hệ lực trong hình dưới đây cân bằng.
Để tìm giá trị của lực \(X_1\), ta lấy tổng mô men của tất cả các lực đối với điểm \(A\) nằm trên phương của lực \(X_2\) và cách điểm đặt lực một đoạn bằng \(l\) như trên hình vẽ sau:
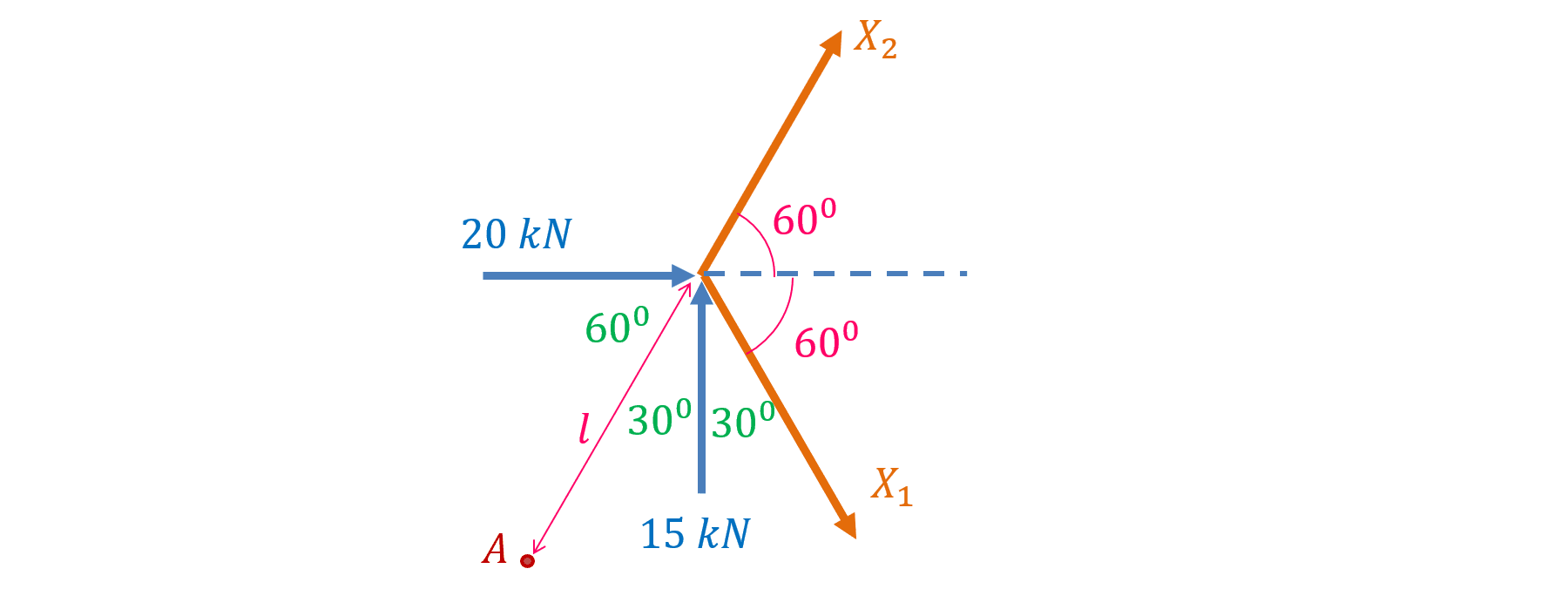
Lấy tổng mô men của tất cả các lực đối với điểm \(A\) với quy ước mô men xoay thuận chiều kim đồng hồ là dương, ta được:
\(X_1 l sin60^o – 15 l sin30^o + 20 l sin60^o = 0\)
(xem thêm: cách xác định cánh tay đòn; cách xác định chiều xoay của mô men; hệ thức lượng trong tam giác vuông)
Thay \(sin30^o = 1/2; sin30^o = \sqrt{3}/2\) vào phương trình trên đây ta tính được \(X_1 = -(20-5\sqrt{3}) (kN)\).
Ví dụ áp dụng 2
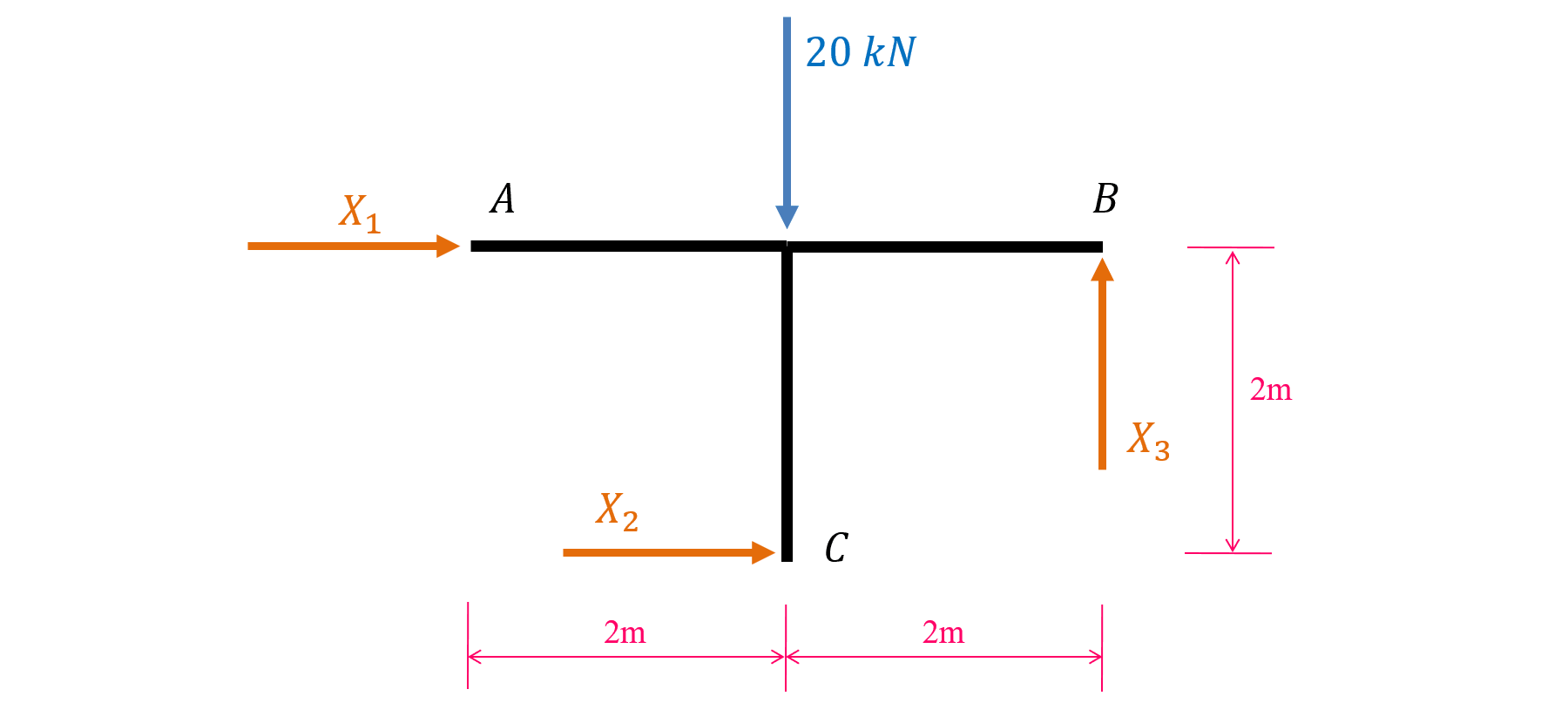
Xác định giá trị của các lực \(X_1\), \(X_2\) và \(X_3\) trên hình sau để hệ lực cân bằng.
Áp dụng nguyên tắc: muốn tìm một lực nào đó, ta sử dụng phương trình cân bằng sao cho có thể triệt tiêu được các lực chưa biết khác.
Theo đó, muốn tìm lực \(X_1\), ta viết phương trình cân bằng mô men tại điểm \(D\) như hình bên dưới. Vì điểm \(D\) là giao điểm của lực \(X_2\) và \(X_3\) nên phương trình cân bằng mô men này chỉ chứa lực \(X_1\). Khi đó ta sẽ tìm ngay ra được lực \(X_1\).
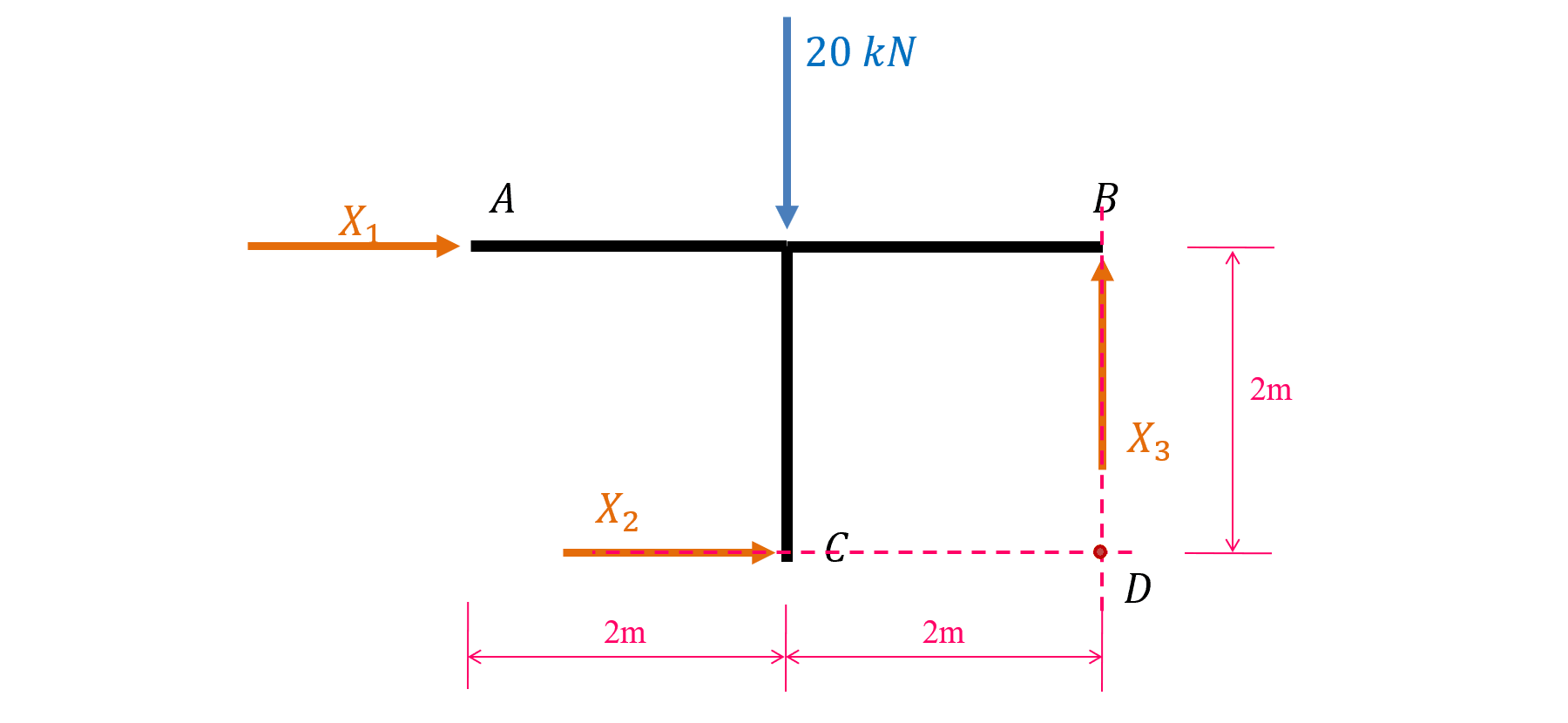
Phương trình tổng mô men của các lực đối với điểm \(D\) với quy ước mô men xoay thuận chiều kim đồng hồ là dương có dạng:
\(X_1 \times 2 – 20\times 2 = 0\)
(xem thêm: cách xác định cánh tay đòn; cách xác định chiều xoay của mô men)
Từ phương trình trên ta có \(X_1 = 20 (kN)\).
Muốn tìm lực \(X_2\), ta viết phương trình cân bằng mô men tại điểm \(B\). Vì điểm \(B\) là giao điểm của lực \(X_1\) và \(X_3\) nên phương trình cân bằng mô men này chỉ chứa lực \(X_2\). Khi đó ta sẽ tìm ngay ra được lực \(X_2\).
Phương trình tổng mô men của các lực đối với điểm \(B\) với quy ước mô men xoay thuận chiều kim đồng hồ là dương có dạng:
\(-X_2 \times 2 – 20\times 2 = 0\)
(xem thêm: cách xác định cánh tay đòn; cách xác định chiều xoay của mô men)
Từ phương trình trên ta có \(X_2 = -20 (kN)\). Dấu “\(-\)” ở đây để chỉ rằng chiều của lực \(X_2\) là ngược lại với chiều trong hình vẽ trên đây.
Để tìm lực \(X_3\) ta chiếu tất cả các lực lên phương đứng. Vì phương đứng này vuông góc với lực \(X_1\) và \(X_2\) nên phương trình cân bằng lực theo phương đứng chỉ chứa lực \(X_3\). Khi đó ta sẽ tìm được trực tiếp lực \(X_3\). Cụ thể:
\(X_3 – 20 = 0\)
Suy ra \(X_3 = 20 (kN)\).