Back to: CƠ HỌC CÔNG TRÌNH
Trọng tâm bài học
Gối tựa di động là loại gối tựa có thể ngăn cản được một thành phần chuyển vị tịnh tiến của tiết diện (xem thêm về các thành phần chuyển vị của tiết diện tại đây). Thành phần chuyển vị này có thể theo phương bất kỳ.
Vì gối tựa di động ngăn cản một thành phần chuyển vị tịnh tiến nên trong nó xuất hiện một thành phần phản lực tương ứng theo phương của chuyển vị mà nó ngăn cản. Xem minh họa như hình dưới đây:
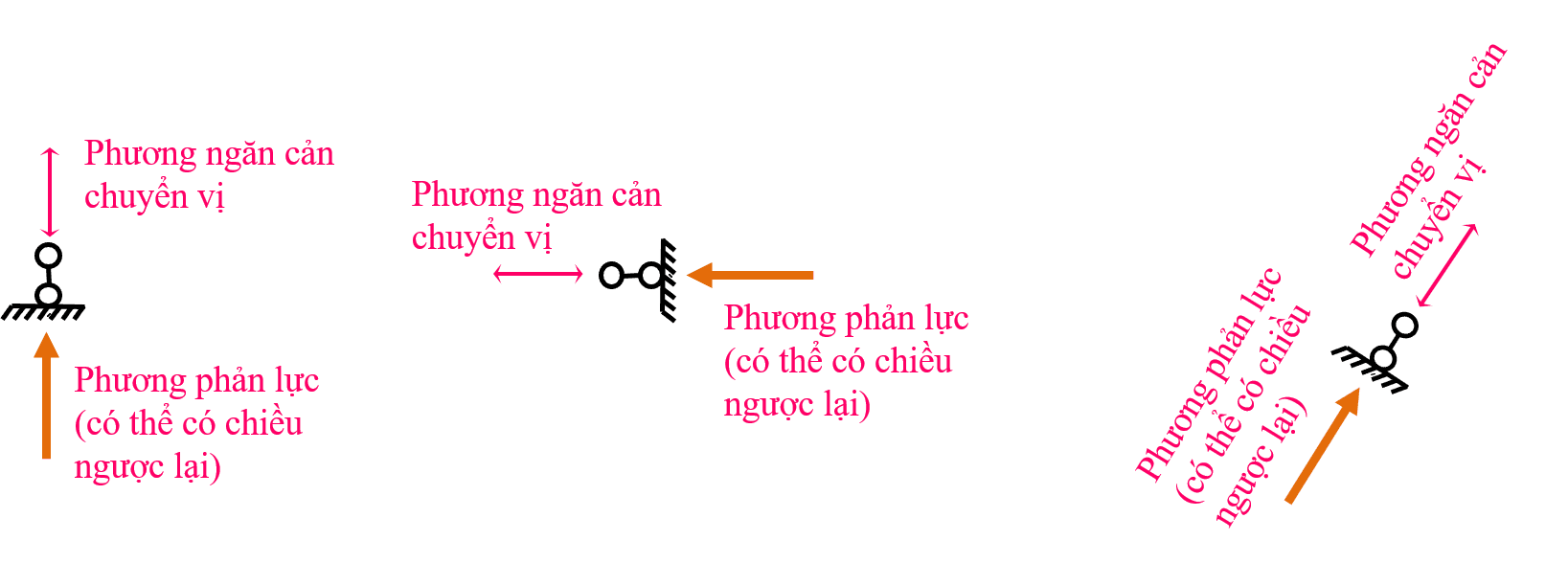
Hình vẽ sau đây thể hiện một số cách biểu diễn của gối tựa di động:

Ví dụ
Tính các phản lực tại các gối tựa của hệ chịu lực như hình vẽ sau:
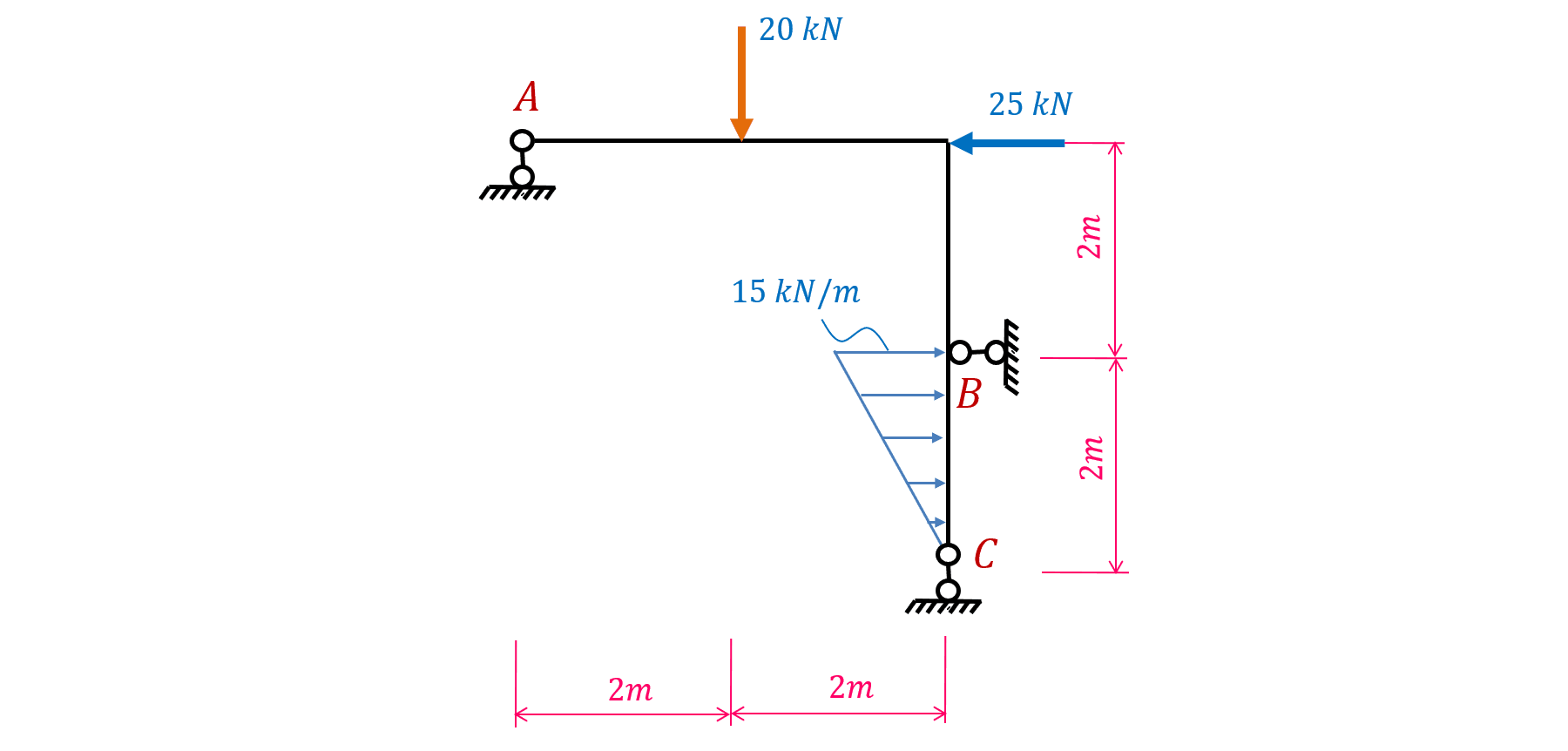
Bạn có thể tham khảo thêm về: Hợp lực của lực phân bố; Phương trình cân bằng lực; Phương trình cân bằng mô men.
Bài giải:
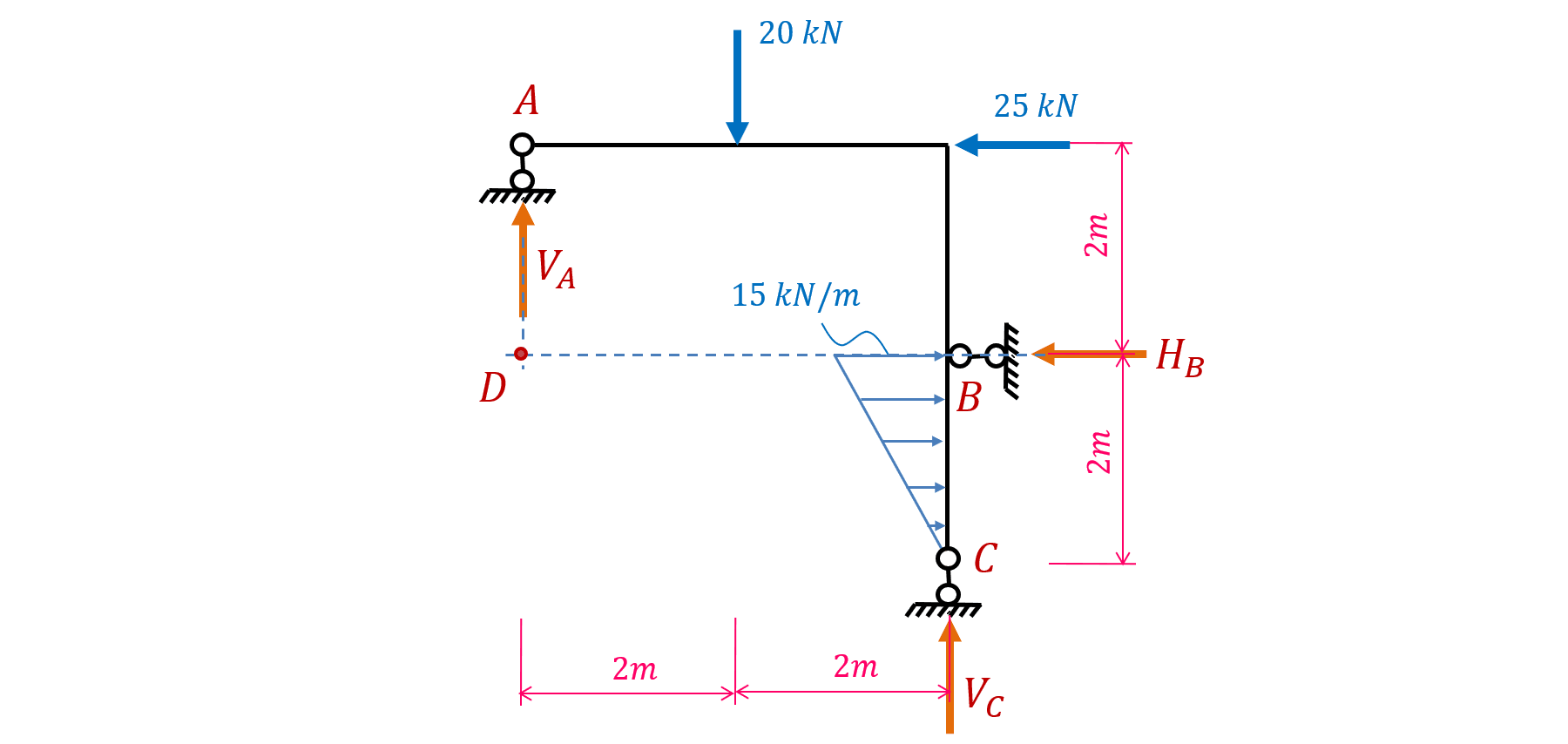
Trước hết ta phải xác định là tại mỗi gối tựa nó có những thành phần phản lực nào. Trong hệ trên, các gối tựa đều là các gối di động, do đó tại mỗi gối tựa có một thành phần phản lực theo phương mà nó ngăn cản chuyển vị. Gọi phản lực tại các gối tựa \(A\), \(B\) và \(C\) lần lượt là \(V_A\), \(H_B\) và \(V_C\). Trong đó “\(H\)” là viết tắt của chữ Horizontal (nghĩa là nằm ngang) còn chữ “\(V\)” được viết tắt từ chữ Vertical (nghĩa là thẳng đứng). Tất nhiên bạn được quyền gọi bằng các tên khác tùy thích, nhưng gọi tên như vậy cho nó có vẻ Tây Tây xíu. Giả sử các thành phần phản lực có chiều dương như trên hình vẽ sau:
Để tìm các phản lực \(V_A\), \(H_B\) và \(V_C\), ta sử dụng nguyên tắc: muốn tìm một lực chưa biết trong số 3 lực phẳng không đồng quy, không song song, ta sử dụng phương trình cân bằng sao cho có thể loại bỏ được hai lực còn lại (xem thêm bài Ví dụ 2 tại đây).
Theo đó, muốn tìm lực \(V_A\), ta phải loại bỏ lực \(V_C\) và \(H_B\). Muốn vậy ta sử dụng phương trình cân bằng mô men đối với điểm \(B\) (là giao điểm của hai lực này). Giả sử mô men xoay thuận chiều kim đồng hồ là dương thì phương trình cân bằng mô men của hệ lực đối với điểm \(B\) được viết như sau (Xem thêm mô men của một lực đối với một điểm; hợp lực của lực phân bố):
\(V_A\times 4-20\times 2-25\times 2 -\frac{1}{2}\times 15\times 2\times \frac{1}{3}\times 2 = 0\)
Suy ra \(V_A = 25 (kN)\)
Tương tự như vậy, muốn tính \(V_C\) thì ta viết phương trình cân bằng mô men đối với điểm \(D\). Có bạn cãi là bây giờ có \(V_A\) rồi thì ta viết phương trình cân bằng lực theo phương đứng cũng tính được \(V_C\) chứ mắc mớ gì viết phương trình cân bằng mô men tại \(D\) cho mệt. Đúng rồi. Tính vậy thì có thể nhanh hơn, nhưng rủi ro cao. Vì lỡ trên đây ta tính \(V_A\) sai thì bây giờ tính \(V_C\) theo kiểu này khó mà trúng được.
Mà thôi, tính kiểu gì kệ bạn, ra \(V_C=-5 kN\) là được!
Bây giờ muốn tính \(H_B\) thì ta viết phương trình cân bằng lực lên phương ngang. Khi đó các lực \(V_A\) và \(V_C\) vuông góc với phương ngang nên không tham gia vào phương trình cân bằng này. Ta có:
\(-25-H_B+\frac{1}{2}\times 15\times 2 = 0\)
Suy ra \(H_B=-5 kN\)
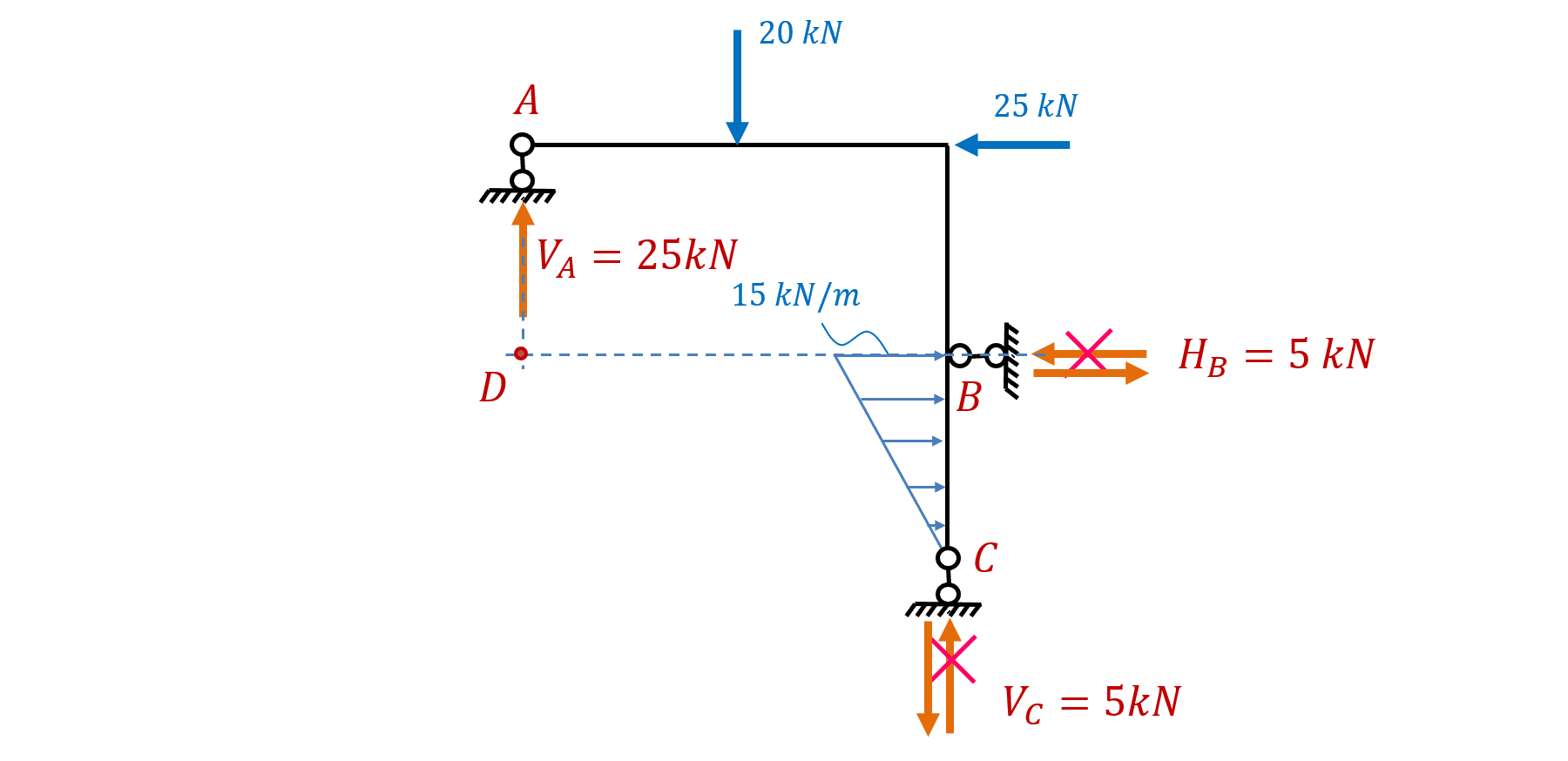
Trong các kết quả tính toán trên ta thấy \(V_C\) và \(H_B\) âm. Điều này có nghĩa là chiều của các lực này theo giả thiết trên đây là sai. Chiều thiệt của nó là theo hướng ngược lại. Để thuận lợi cho các tính toán về sau, ta gạch bỏ (không tẩy sạch) chiều giả thiết đi rồi ghi chiều đúng và giá trị của phản lực vào như hình dưới đây: