
| <Trang trước | Trang kế> |
Nói nhanh cho đỡ tốn thời gian:
Dưới tác dụng của động đất thì hệ sẽ có chuyển vị lớn nhất là \(D\). Bây giờ thay vì cho hệ chuyển động nền, ta tác dụng lên hệ một lực tĩnh \(f_s\) sao cho nó cũng gây ra chuyển vị là \(D\). Lực \(f_s\) như vậy được gọi là lực tĩnh tương đương với động đất (vì nó gây ra chuyển vị bằng với chuyển vị lớn nhất mà động đất gây ra). Giá trị của lực tĩnh tương đương \(f_s\) được tính như sau:
\(f_s = m\omega ^2_n D=mA\) (1)
trong đó \(\omega_n\) và \(m\) lần lượt là tần số vòng tự nhiên và khối lượng của hệ, \(A=\omega ^2_n D = 4\pi^2D/T_n^2\) là gia tốc giả, \(T_n\) là chu kỳ tự nhiên của hệ.
Đối với hệ có tỉ số cản bé thì gia tốc giả xấp xỉ với gia tốc tuyệt đối.
Rồi, bây giờ muốn hiểu rõ hơn thì đọc tiếp. Không muốn thì thôi.
Sau khi giải phương trình vi phân chủ đạo, ta sẽ tìm được chuyển vị tương đối \(u\), vận tốc tương đối \(\dot{u}\) và gia tốc tương đối \(\ddot{u}\) của hệ. Ta cũng có thể tìm được gia tốc tuyệt đối \(\ddot{u}_t\) của hệ bằng cách cộng gia tốc tương đối \(\ddot{u}\) với gia tốc nền \(\ddot{u}_g\). Xem tại đây để biết ý nghĩa của các đại lượng phản ứng liên quan đến chuyển vị.
Trong thiết kế, ngoài phản ứng chuyển vị ra ta còn quan tâm đến các loại phản ứng khác như nội lực và biến dạng, đặc biệt là nội lực lớn nhất trong các cấu kiện trong suốt thời gian diễn ra rung động nền.
Bình luận
Chuyển vị và nội lực là hai đại lượng quan trọng trong thiết kế kết cấu công trình. Tuy nhiên theo quan sát của mình thì hiện nay phần lớn anh em khi thiết kế chỉ quan tâm đến nội lực mà ít quan tâm đến chuyển vị (mình viết ‘anh em’ là để thuận miệng thôi, chứ có cả các chị trong đó nữa nhé). Điều này có lẽ xuất phát từ suy nghĩ đơn giản là khi thiết kế, nhiều anh em chỉ suy nghĩ đến một điều đó là làm sao để công trình đừng sụp là được. Đây là yêu cầu về tính an toàn (safety) hay yêu cầu về mặt cường độ (strength) của công trình, tức là yêu cầu liên quan đến trạng thái giới hạn I trong thiết kế. Thông thường, để thỏa mãn yêu cầu này thì ta phải thiết kế cấu kiện sao cho khả năng chịu lực (hay cường độ) của tiết diện lớn hơn hoặc tối thiểu là bằng với nội lực xuất hiện trong cấu kiện là được. Tư duy này là ổn đối với thiết kế theo điều kiện cường độ cho kết cấu làm việc gần như đàn hồi chịu tải trọng tĩnh.
Rồi đây, nếu bạn tiếp tục đọc đến nơi đến chốn tài liệu này, thì bạn sẽ thấy trong thiết kế kết cấu chịu động đất thì điều này có thể không đúng. Để công trình không sụp do động đất thì ta phải giới hạn chuyển vị đến một mức nào đó. Lúc này nội lực mà ta tính toán được không phải là yếu tố quyết định đến khả năng sụp đổ của công trình. Ở đây tạm thời thông tin đến bạn sơ sơ như vậy cho vui, đồng thời cũng khơi gợi tính tò mò của bạn thôi. Nếu bạn chưa hiểu thì cũng không sao đâu.
Để tính nội lực lớn nhất trong các cấu kiện của kết cấu chịu động đất, trong thiết kế người ta thường sử dụng phương pháp lực tĩnh ngang tương đương. Phương pháp này được thực hiện dựa trên ý tưởng và lập luận như sau.
Xét hệ một bậc tự do chịu chuyển động nền như Hình 1 bên dưới.
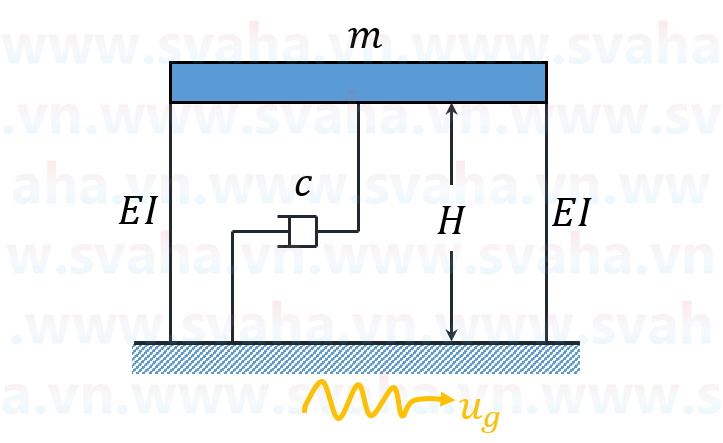
Theo như tại đây, phương trình vi phân chủ đạo của hệ trên Hình 1 là:
\(m\ddot{u} + c\dot{u} + ku=-m\ddot{u}_g\) (2)
Trong đó \(k=24EI/H^3\) là độ cứng tương đương ứng với chuyển vị ngang của \(m\).
Giải phương trình (2) (xem tại đây) ta sẽ tìm được lịch sử chuyển vị \(u\). Sau khi có lịch sử chuyển vị \(u\), ta sẽ tìm được chuyển vị lớn nhất \(D\) của khối lượng \(m\).
Cũng xét hệ như trên Hình 1 nhưng bây giờ nó không chịu chuyển động nền nữa mà là chịu một lực tĩnh \(f_s\) như trong Hình 2 bên dưới. Dưới tác dụng của lực tĩnh này thì hệ sẽ có một chuyển vị là \(\Delta\) như trên hình. Lực tĩnh là lực không đổi theo thời gian, do đó kết quả phản ứng (cụ thể ở đây là chuyển vị \(\Delta\)) cũng không đổi theo thời gian, do đó sẽ không có vận tốc hay gia tốc. Chính vì vậy mà mình không biểu diễn khối lượng và hệ số cản trên hình này vì hai đại lượng này không có tác dụng gì trong bài toán tĩnh.
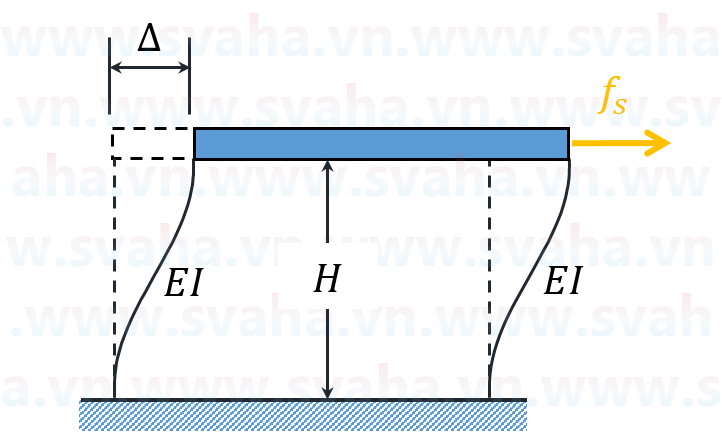
Nếu chuyển vị \(\Delta\) do lực \(f_s\) gây ra trong Hình 2 bằng với chuyển vị lớn nhất \(D\) do chuyển động nền gây ra trong Hình 1 thì ta nói lực \(f_s\) là tương đương với chuyển động nền. Nói là tương đương vì chúng gây ra chuyển vị (lớn nhất) bằng nhau (vì vậy nội lực và biến dạng đàn hồi lớn nhất cũng bằng nhau).
Vấn đề là lực \(f_s\) bằng bao nhiêu để nó gây ra được một chuyển vị là \(\Delta = D\)?
Theo lập luận tại đây, quan hệ giữa \(f_s\) và \(\Delta\) được viết là:
\(f_s = k\Delta\), với \(k=24EI/H^3\) (3)
Để \(\Delta\) bằng \(D\) thì:
\(f_s = kD\) (4)
Nhớ lại (xem tại đây) là ta có liên hệ giữa khối lượng \(m\), độ cứng \(k\) và tần số vòng tự nhiên \(\omega _n\) như sau:
\(\omega _n = \sqrt{\frac{k}{m}}\) (5)
Hay:
\(k = \omega ^2_n m\) (6)
Thay (6) vào (4) ta được:
\(f_s = m\omega ^2_n D\) (7)
Như vậy lực tĩnh ngang tương đương được tính bằng cách lấy khối lượng \(m\) nhân với \(\omega_n^2D\). Đại lượng:
\(A=\omega_n^2D\) (8)
đóng vai trò như gia tốc (vì đem nó nhân với khối lượng thì ra lực, giống trong định luật Newton II) nên người ta gọi nó là gia tốc giả (pseudo acceleration). Gọi nó là gia tốc vì nó có vai trò của gia tốc (và có đơn vị của gia tốc). Gọi nó là gia tốc giả vì nó không phải là gia tốc thiệt.
Đối với hệ có tỉ số cản nhỏ thì gia tốc giả nó gần bằng với gia tốc tuyệt đối lớn nhất. Thí dụ, xét hệ có khối lượng \(m=1 kg\), \(k = 50 N/m\). Theo đó, chu kỳ tự nhiên của hệ là \(T_n=0.889 s\). Sử dụng công cụ phân tích tại đây với các tỉ số cản khác nhau (băng gia tốc được lấy mặc định trong bảng tính đó) ta được kết quả như Bảng 1 sau:
| Tỉ số cản | Chuyển vị lớn nhất (m) | Gia tốc giả (m/s2) | Gia tốc tuyệt đối (m/s2) | Sai khác giữa gia tốc tuyệt đối so với gia tốc giả (%) |
| 0.05 | 0.109 | 5.445 | 5.488 | 0.79 |
| 0.10 | 0.0689 | 3.442 | 3.519 | 2.25 |
| 0.15 | 0.0508 | 2.538 | 2.645 | 4.23 |
| 0.20 | 0.0416 | 2.078 | 2.315 | 11.4 |
| 0.25 | 0.0388 | 1.938 | 2.269 | 17.1 |
| 0.30 | 0.0360 | 1.798 | 2.223 | 23.6 |
Theo như bảng trên, khi tỉ số cản càng lớn thì sai số giữa gia tốc tuyệt đối và gia tốc giả càng tăng. Xu hướng này xảy ra cho tất cả các băng gia tốc khi chu kỳ tự nhiên của hệ là đủ lớn. Khi chu kỳ tự nhiên của hệ rất bé thì gia tốc giả với gia tốc thật là xấp xỉ nhau, bất kể tỉ số cản là bao nhiêu.
| <Trang trước | Trang kế> |